- Accueil
- 6ème
- 5ème
- Mon année de 5ème
- Habitats ou ouvrages
- Analyse et conception
- Contraintes
- Matériaux
- Habitat : fonctions et structures
- Stabilité d'une structure
- Organisation fonctionnelle
- Aménager un espace
- Maisons sur pilotis
- Conception d'une maison
- Abriter l'entrée des salles de technologie
- Franchir un obstacle
- Les logiciels Jeulin
- 4ème
- 3ème
- Tice
- Réalisations
- OT
- À propos





Liens utiles


Boite à outils informatique
Technoschool.free.fr
La technologie au collège
Ce site est destiné à un usage purement éducatif, restreint à deux établissements et ne sera pas référencé.
Pour tout problème de droits ou si vous voulez voir disparaître un document, envoyer un mail à : courstechnologie@free.fr

Fournitures scolaires


Documents d'accueil


Cahier de texte théorique




Logiciels gratuit





Documents officiels

Tutoriels à regarder

Tutoriels à lire
Edrawing
Gantt project


Objectif : Mettre en relation des contraintes que lobjet technique doit respecter et les solutions techniques retenues. Chaînes dénergie et chaîne dinformation.
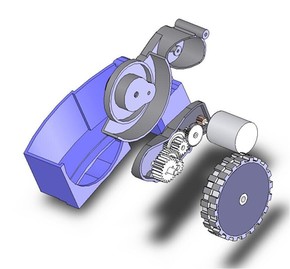
PRINCIPE DE DÉPLACEMENT
L'aspirateur robot est muni de deux roues motrices arrières et dune roue folle à lavant tournant librement sur elle même.
Roues motrices avec motoreducteur quatre étages :
Les deux roues motrices arrières sont indépendantes ce qui permet de faire tourner le robot sur lui même en faisant tourner les deux moteurs dans un sens différent (système char).
Chaque roue est équipée d'un codeur simple permettant de compter les tours de roue.
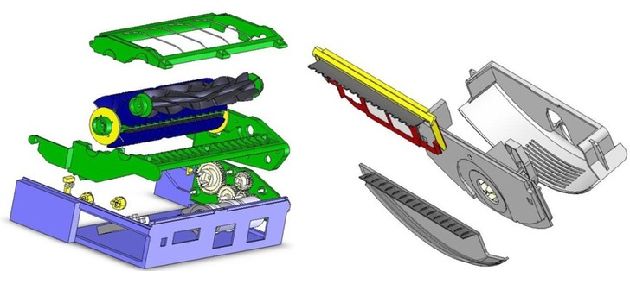
SYSTÈME DE NETTOYAGE
L'aspirateur robot est doté d'un système de nettoyage breveté à trois phases :

Les brosses à mouvement latéral inversé et à double action ramassent les débris pendant que l'aspirateur élimine la poussière.
SYSTÈME DE RECHARGEMENT
L'aspirateur robot est alimenté par une batterie nimh rechargeable. Elle peut durer des centaines de cycles de nettoyage si elle est bien entretenue.
Le chargement du robot peut se faire de deux manières :
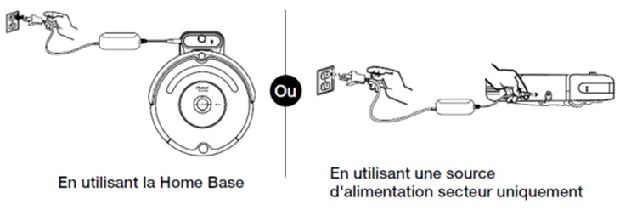
L'aspirateur revient à sa base à la fin du cycle de nettoyage ou lorsque sa batterie est faible.
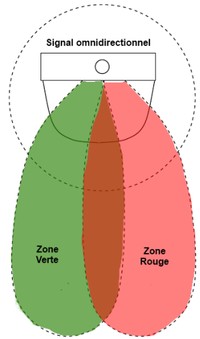
Le robot est équipé de 3 récepteurs infrarouges, un omnidirectionnel et deux sur son pare-choc avant.
PRINCIPE :
1 - Diffusion d'un faisceau infrarouge omnidirectionnel pour localiser la base.
2 - Quand le robot est dans la zone Rouge il tourne à gauche.
3 - Quand le robot est dans la zone Verte il tourne à droite.
4 - Quand le robot est dans la zone commune Rouge & Verte il avance tout droit
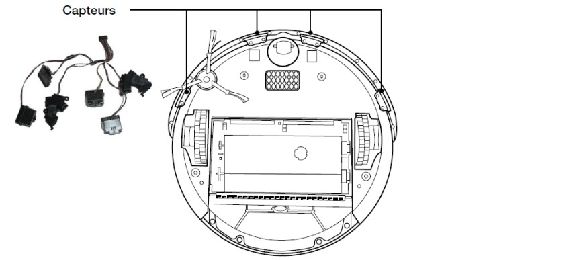
SYSTÈME DE DÉTECTION D'OBSTACLE
L'aspirateur robot identifie les meubles et autres obstacles, ralentit lorsqu'il s'en approche, puis touche l'obstacle en douceur avec son pare-chocs avant de changer de direction.

Six capteurs infrarouges, répartis sur l'avant du robot, donnent une information sur la distance d'un obstacle

SYSTÈME DE DÉTECTION DE VIDE
L'aspirateur robot sait lorsqu'il s'approche d'escaliers et autres descentes.
Il nettoie jusqu'au bord, puis change de direction automatiquement et en toute sécurité afin d'éviter les chutes.
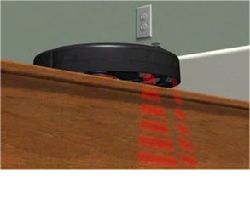
Quatre capteurs infrarouges sont répartis sous l'avant du robot, donnant des informations sur :
- La couleur du sol (capteur analogique)
- La présence de vide (capteur numérique)